ODE Review: Projectile Motion#
Let’s try solving for projectile motion with drag (air resistance).
We want to solve:
where \(m\) is the mass of the projectile and
is the Newton drag term that is applicable for large Reynolds numbers (turbulent), and \(\rho_\mathrm{air}\) is the density of air, \(C\) is the drag coefficient, \(A\) is the cross-section area of the projectile.
Note
Since the force here depends on velocity, we can’t use the velocity-Verlet method.
We’ll consider a baseball. Then we can take:
\(C = 0.3\)
\(A = \pi (d/2)^2\) with the diameter of a baseball, \(d = 7.4~\mathrm{cm}\)
\(m = 145~\mathrm{g}\)
\(\rho_\mathrm{air} = 1.2\times 10^{-3}~\mathrm{g/cm^3}\)
We also take gravity as constant, \(g = 981~\mathrm{cm/s^2}\).
We’ll imagine throwing the baseball from some height \(y_0\) above the ground (\(y = 0\)) at an angle \(\theta\) from the horizontal with velocity magnitude \(V\).
This means our initial conditions are:
and we want to integrate until the ball hits the ground, \(y(t_\mathrm{max}) = 0\).
Let’s implement this using 4th-order Runge-Kutta.
import numpy as np
C = 0.3
d = 7.4
m = 145
A = np.pi * (d/2)**2
rho_air = 1.2e-3
g = 981
def rhs(xvec, do_drag=True):
x, y, u, v = xvec
dxdt = u
dydt = v
if do_drag:
vmag = np.sqrt(u*u + v*v)
F_drag = -0.5 * C * rho_air * A * vmag
else:
F_drag = 0.0
dudt = F_drag / m * u
dvdt = F_drag / m * v - g
return np.array([dxdt, dydt, dudt, dvdt])
Now our integration routine.
Usually I would have defined a simple class to store the state at each instance of time, which would make this code a bit more compact. But in class we decided to explicitly write everything out.
def integrate(dt, *, y0=100, vmag=5.e3, theta=45, do_drag=True):
xs = [0]
ys = [y0]
us = [vmag * np.cos(np.radians(theta))]
vs = [vmag * np.sin(np.radians(theta))]
ts = [0]
while ys[-1] > 0.0:
# start with the previous state
t = ts[-1]
x = xs[-1]
y = ys[-1]
u = us[-1]
v = vs[-1]
k1 = rhs([x, y, u, v], do_drag=do_drag)
k2 = rhs([x + 0.5*dt * k1[0],
y + 0.5*dt * k1[1],
u + 0.5*dt + k1[2],
v + 0.5*dt + k1[3]], do_drag=do_drag)
k3 = rhs([x + 0.5*dt * k2[0],
y + 0.5*dt * k2[1],
u + 0.5*dt + k2[2],
v + 0.5*dt + k2[3]], do_drag=do_drag)
k4 = rhs([x + dt * k3[0],
y + dt * k3[1],
u + dt + k3[2],
v + dt + k3[3]], do_drag=do_drag)
x += dt/6 * (k1[0] + 2*k2[0] + 2*k3[0] + k4[0])
y += dt/6 * (k1[1] + 2*k2[1] + 2*k3[1] + k4[1])
u += dt/6 * (k1[2] + 2*k2[2] + 2*k3[2] + k4[2])
v += dt/6 * (k1[3] + 2*k2[3] + 2*k3[3] + k4[3])
xs.append(x)
ys.append(y)
us.append(u)
vs.append(v)
ts.append(t + dt)
return ts, xs, ys, us, vs
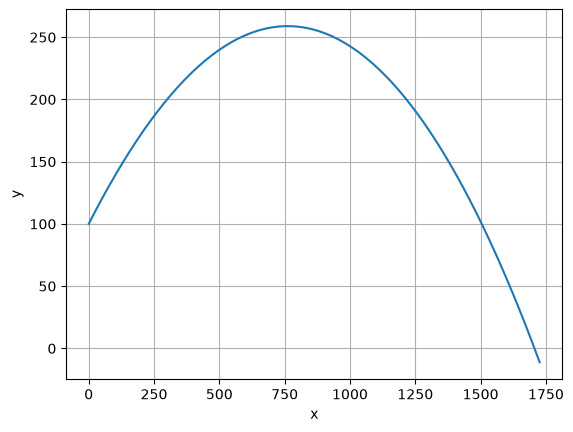
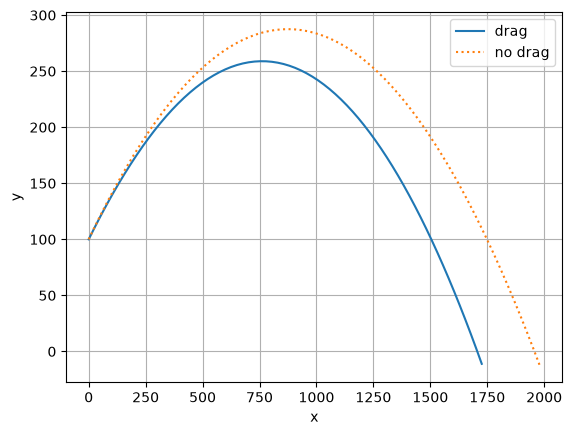
Comparing drag vs. no drag#
y0 = 100
vmag = 2000
theta = 45
t, x, y, u, v = integrate(0.02, y0=y0,
vmag=vmag, theta=theta)
import matplotlib.pyplot as plt
fig, ax = plt.subplots()
ax.plot(x, y, label="drag")
ax.grid()
ax.set_xlabel("x")
ax.set_ylabel("y")
Text(0, 0.5, 'y')
tn, xn, yn, un, vn = integrate(0.02, y0=y0,
vmag=vmag, theta=theta, do_drag=0)
ax.plot(xn, yn, label="no drag", ls=":")
ax.legend()
fig
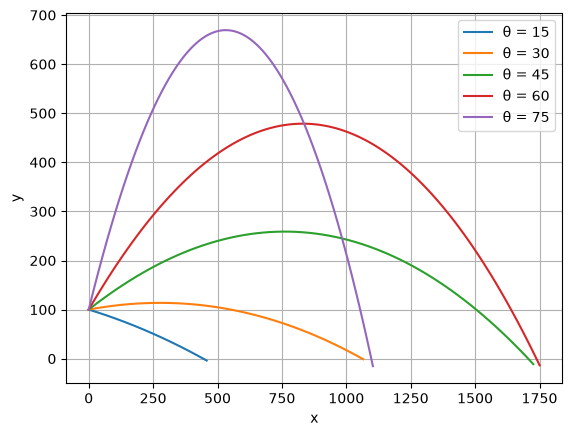
Variation with angle#
Let’s vary the angle to see the effect drag has
fig, ax = plt.subplots()
for theta in [15, 30, 45, 60, 75]:
t, x, y, u, v = integrate(0.02, y0=y0,
vmag=vmag, theta=theta)
ax.plot(x, y, label=f"θ = {theta}")
ax.legend()
ax.grid()
ax.set_xlabel("x")
ax.set_ylabel("y")
Text(0, 0.5, 'y')