
Application: Stationary State of Lorenz System#
The Lorenz system is a simplified model of atmospheric convection that was an important early model in the development of the theory of chaos in dynamical systems.
The model takes the form of a system of ODEs:
where \(\sigma\), \(\rho\), and \(\beta\) are parameters in the model.
We can write the system as:
with
We want to find the stationary solutions, i.e., if we express \({\bf x} = (x, y, z)^\intercal\), then we want to find the \({\bf x}\)’s that give \({\bf f}({\bf x}) = 0\).
We’ll need the Jacobian—for this system it is:
import numpy as np
import matplotlib.pyplot as plt
# constants
# these are the values from Lorenz (1963) in section 7
sigma = 10.0
rho = 28.0
beta = 8./3.
def rhs(xvec):
x, y, z = xvec
xdot = sigma * (y - x)
ydot = rho * x - y - x * z
zdot = x * y - beta * z
return np.array([xdot, ydot, zdot])
def jac(xvec):
x, y, z = xvec
return np.array([[-sigma, sigma, 0.0],
[rho - z, -1.0, -x],
[y, x, -beta]])
def lorenz_roots(xvec0, tol=1.e-8):
"""given an initial guess xvec0, find the roots using Newton's method"""
xvec = xvec0.copy()
err = 1.e100
while err > tol:
# get the jacobian
J = jac(xvec)
# get the current RHS
f = rhs(xvec)
# solve for the correction: J dx = -f
dx = np.linalg.solve(J, -f)
xvec += dx
xscale = np.max(np.abs(xvec))
if xscale == 0.0:
xscale = 1.0
err = np.max(np.abs(dx)) / xscale
return xvec
Note
We used np.max(np.abs(dx)) for the error—this is basically the inf-norm. We could
have also used np.linalg.norm()
We need to pick different initial guesses to find all of the roots.
xvec = np.array([1., 1., 1.])
r1 = lorenz_roots(xvec)
r1
array([0., 0., 0.])
xvec = np.array([10., 10., 10.])
r2 = lorenz_roots(xvec)
r2
array([ 8.48528137, 8.48528137, 27. ])
xvec = np.array([-10., -10., -10.])
r3 = lorenz_roots(xvec)
r3
array([-8.48528137, -8.48528137, 27. ])
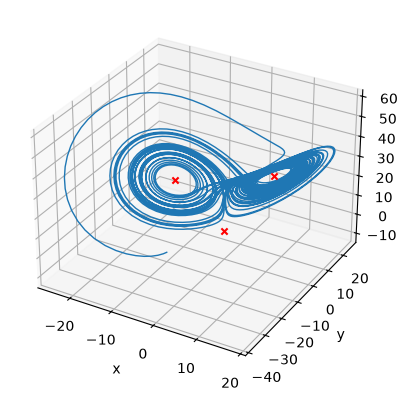
To complete this, let’s plot a solution to the Lorenz system together with these stationary points.
We’ll use the SciPy solve_ivp function to do the integration.
from scipy import integrate
sol = integrate.solve_ivp(lambda t, y: rhs(y),
[0, 50], [-10, -10, -10],
rtol=1.e-8)
fig, ax = plt.subplots(subplot_kw={'projection': '3d'})
ax.plot(sol.y[0, :], sol.y[1, :], sol.y[2, :], lw=1)
ax.scatter(r1[0], r1[1], r1[2], marker="x", color="r")
ax.scatter(r2[0], r2[1], r2[2], marker="x", color="r")
ax.scatter(r3[0], r3[1], r3[2], marker="x", color="r")
ax.set_xlabel("x")
ax.set_ylabel("y")
ax.set_zlabel("z")
Text(0.5, 0, 'z')
In-class exercise#
Let’s redo this algorithm using our C++ implementation.
The final implementation is available here: lorenz-roots.cpp
It requires our C++ version of the Gaussian elimination solver.