
Adaptive RK4 Orbits#
We’ll use the same basic ideas in our fixed timestep RK4 integrator.
import numpy as np
import matplotlib.pyplot as plt
# global parameters
GM = 4.0 * np.pi**2 # assuming M = 1 solar mass
OrbitState#
The OrbitState class is unchanged.
class OrbitState:
# a container to hold the star positions
def __init__(self, x, y, u, v):
self.x = x
self.y = y
self.u = u
self.v = v
def __add__(self, other):
return OrbitState(self.x + other.x, self.y + other.y,
self.u + other.u, self.v + other.v)
def __sub__(self, other):
return OrbitState(self.x - other.x, self.y - other.y,
self.u - other.u, self.v - other.v)
def __mul__(self, other):
return OrbitState(other * self.x, other * self.y,
other * self.u, other * self.v)
def __rmul__(self, other):
return self.__mul__(other)
def __str__(self):
return f"{self.x:10.6f} {self.y:10.6f} {self.u:10.6f} {self.v:10.6f}"
Integrator class#
We’ll put all of the logical for the integration and stepsize control into a class, called OrbitsRK4.
The main Runge-Kutta algorithm that we already explored is now in a function single_step().
class OrbitsRK4:
""" model the evolution of a single planet around the Sun"""
def __init__(self, a, e):
""" a = semi-major axis (in AU),
e = eccentricity """
self.a = a
self.e = e
x0 = 0.0 # start at x = 0 by definition
y0 = a*(1.0 - e) # start at perihelion
# perihelion velocity (see C&O Eq. 2.33 for ex)
u0 = -np.sqrt( (GM/a)* (1.0 + e) / (1.0 - e) )
v0 = 0.0
self.history = [OrbitState(x0, y0, u0, v0)]
self.time = [0.0]
self.n_reset = None
def kepler_period(self):
""" return the period of the orbit in yr """
return np.sqrt(self.a**3)
def energy(self, n):
""" return the energy (per unit mass) at time n """
state = self.history[n]
return 0.5 * (state.u**2 + state.v**2) - \
GM / np.sqrt(state.x**2 + state.y**2)
def rhs(self, state):
""" RHS of the equations of motion."""
# current radius
r = np.sqrt(state.x**2 + state.y**2)
# position
xdot = state.u
ydot = state.v
# velocity
udot = -GM * state.x / r**3
vdot = -GM * state.y / r**3
return OrbitState(xdot, ydot, udot, vdot)
def single_step(self, state_old, dt):
""" take a single RK-4 timestep from t to t+dt for the system
ydot = rhs """
# get the RHS at several points
ydot1 = self.rhs(state_old)
state_tmp = state_old + 0.5 * dt * ydot1
ydot2 = self.rhs(state_tmp)
state_tmp = state_old + 0.5 * dt * ydot2
ydot3 = self.rhs(state_tmp)
state_tmp = state_old + dt * ydot3
ydot4 = self.rhs(state_tmp)
# advance
state_new = state_old + (dt / 6.0) * (ydot1 + 2.0 * ydot2 +
2.0 * ydot3 + ydot4)
return state_new
def integrate(self, dt_in, err, tmax):
""" integrate the equations of motion using 4th order R-K method with an
adaptive stepsize, to try to achieve the relative error err. dt
here is the initial timestep
"""
# start with the old timestep
dt_new = dt_in
dt = dt_in
n_reset = 0
t = 0
while t < tmax:
state_old = self.history[-1]
if err > 0.0:
# adaptive stepping iteration loop -- keep trying to take a step
# until we achieve our desired error
rel_error = 1.e10
n_try = 0
while rel_error > err:
dt = min(dt_new, tmax-t)
# take 2 half steps
state_tmp = self.single_step(state_old, 0.5*dt)
state_new = self.single_step(state_tmp, 0.5*dt)
# now take just a single step to cover dt
state_single = self.single_step(state_old, dt)
# state_new should be more accurate than state_single since it
# used smaller steps
# estimate the relative error now
dstate = state_new - state_single
rel_error = max(abs(dstate.x / state_single.x),
abs(dstate.y / state_single.y),
abs(dstate.u / state_single.u),
abs(dstate.v / state_single.v))
# adaptive timestep algorithm for RK4
dt_est = dt * abs(err/rel_error)**0.2
# give a little safety in our dt_est, and limit the
# amount the timestep can change
dt_new = min(max(0.9 * dt_est, 0.25 * dt), 4.0 * dt)
n_try += 1
if n_try > 1:
# n_try = 1 if we took only a single try at the step
n_reset += (n_try-1)
else:
# take just a single step
dt = min(dt_new, tmax-t)
# take just a single step to cover dt
state_new = self.single_step(state_old, dt)
# successful step
t += dt
# store
self.time.append(t)
self.history.append(state_new)
self.n_reset = n_reset
def plot(self, points=False):
"""plot the orbit"""
fig, ax = plt.subplots()
x = [q.x for q in self.history]
y = [q.y for q in self.history]
# draw the Sun
ax.scatter([0], [0], marker=(20, 1), color="y", s=250)
if points:
ax.scatter(x, y, marker=".")
else:
ax.plot(x, y)
ax.set_aspect("equal")
return fig
Note
We have a lot of freedom in how we define our error. We could use an absolute error instead of a relative error, we could also only consider certain components (like \(x\) and \(y\)), etc.
Highly eccentric orbit#
Let’s create an orbit with a tolerance of \(10^{-5}\), and the a very high eccentricity (\(a = 1\), \(e = 0.95\))
o = OrbitsRK4(1.0, 0.95)
o.integrate(0.05, 1.e-5, o.kepler_period())
How many points did it take?
len(o.history)
92
and how many times did we reset?
o.n_reset
39
Let’s plot it
fig = o.plot(points=True)
fig.set_size_inches(5, 12)
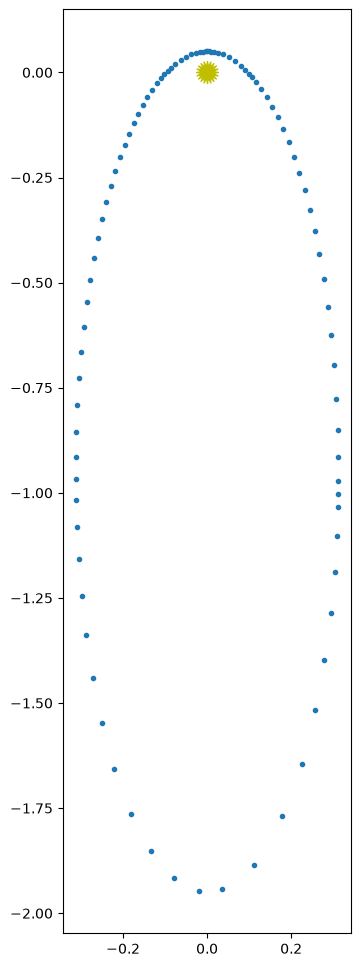
Clearly we see that the size of the timestep is much larger at aphelion as compared to perihelion.
Let’s create a version with a fixed timestep, with a timestep of \(0.001~\mathrm{yr}\). We can do this by passing in a negative error.
o_fixed = OrbitsRK4(1.0, 0.95)
o_fixed.integrate(0.001, -1, o_fixed.kepler_period())
fig = o_fixed.plot()
fig.set_size_inches(5, 12)
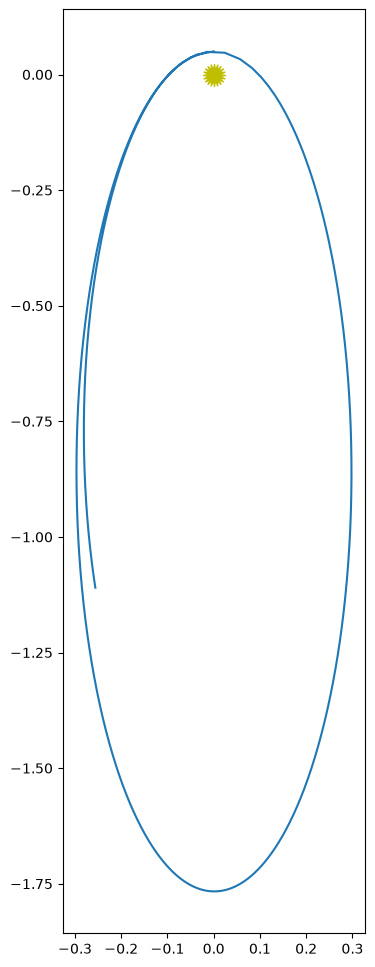
len(o_fixed.history)
1001
We need a really small fixed step size to integrate this at all reasonably
Timestep evolution#
Let’s look at the adaptive version some more. First, let’s look at the timestep evolution.
ts = np.array(o.time)
dt = ts[1:] - ts[:-1]
tc = 0.5 * (ts[1:] + ts[:-1])
fig, ax = plt.subplots()
ax.plot(tc, dt)
ax.set_xlabel("t [yr]")
ax.set_ylabel("dt [yr]")
ax.set_yscale("log")
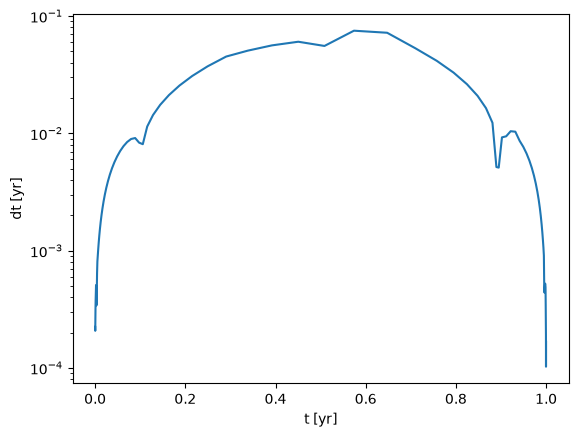
Notice that the timestep changes by ~ 3 orders of magnitude over the evolution.
Energy conservation#
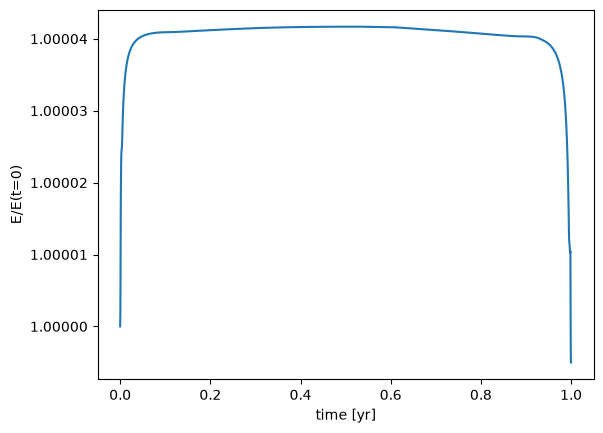
What about energy conservation?
e = []
ts = o.time
for n in range(len(o.history)):
e.append(o.energy(n))
fig, ax = plt.subplots()
ax.plot(ts, e/e[0])
ax.set_xlabel("time [yr]")
ax.set_ylabel("E/E(t=0)")
ax.ticklabel_format(useOffset=False)
Now let’s do 10 orbits
o = OrbitsRK4(1.0, 0.95)
o.integrate(0.05, 1.e-5, 20*o.kepler_period())
e = []
ts = o.time
for n in range(len(o.history)):
e.append(o.energy(n))
fig, ax = plt.subplots()
ax.plot(ts, e/e[0])
ax.set_xlabel("time [yr]")
ax.set_ylabel("E/E(t=0)")
ax.ticklabel_format(useOffset=False)
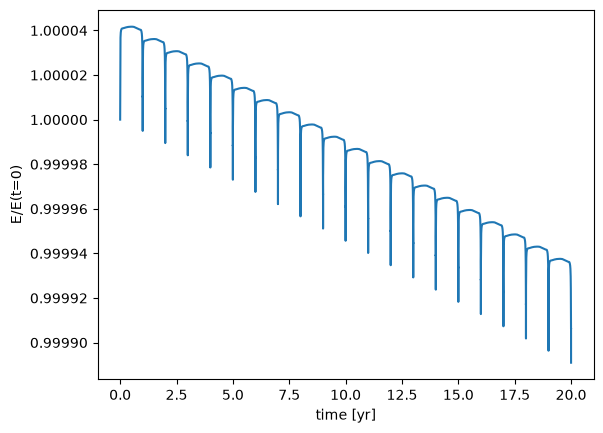
Caution
We can see that RK4 does not conserve energy!
There is a steady decrease in the total energy over 20 orbits. If we wanted to evolve for millions of years, this would certainly be a problem. Making the tolerance tighter certainly will help, but it will also make things a lot more expensive.
The problem is that 4th order Runge-Kutta does not know anything about energy conservation.
C++ implementation#
A C++ implementation following the same ideas is available as orbit_adaptive.cpp
#include <algorithm>
#include <iostream>
#include <vector>
#include <iomanip>
#include <cmath>
#include <limits>
#include <fstream>
#include <numbers>
constexpr double GM = 4.0 * std::numbers::pi * std::numbers::pi;
struct OrbitState {
// a container to hold the star positions
double x{};
double y{};
double u{};
double v{};
OrbitState(double x0, double y0, double u0, double v0)
: x{x0}, y{y0}, u{u0}, v{v0}
{}
OrbitState() = default;
OrbitState operator+(const OrbitState& other) const {
return OrbitState(x + other.x, y + other.y, u + other.u, v + other.v);
}
OrbitState operator-(const OrbitState& other) const {
return OrbitState(x - other.x, y - other.y, u - other.u, v - other.v);
}
OrbitState operator*(double a) const {
return OrbitState(a * x, a * y, a * u, a * v);
}
};
std::ostream& operator<< (std::ostream& os, const OrbitState& s) {
os.precision(6);
os << std::setw(14) << s.x
<< std::setw(14) << s.y
<< std::setw(14) << s.u
<< std::setw(14) << s.v;
return os;
}
inline
OrbitState operator*(double a, const OrbitState& state) {
return OrbitState(a * state.x, a * state.y, a * state.u, a * state.v);
}
class OrbitsRK4 {
// model the evolution of a single planet around the Sun using gravitational
// interaction of three stars
private:
// a vector to store the history of our orbit
std::vector<OrbitState> history;
std::vector<double> time;
int n_reset{0};
public:
OrbitsRK4(const double a, const double e) {
OrbitState initial_conditions;
// put the planet at perihelion
initial_conditions.x = 0.0;
initial_conditions.y = a * (1.0 - e);
initial_conditions.u = std::sqrt((GM / a) * (1.0 + e) / (1.0 - e));
initial_conditions.v = 0.0;
history.push_back(initial_conditions);
time.push_back(0.0);
}
int npts() {
// return the number of integration points
return time.size();
}
int get_n_reset() {
// return the number of times a step was reset
return n_reset;
}
double get_time(const int n) {
// return the physical time for step n
return time[n];
}
OrbitState& get_state(const int n) {
// return a reference to the state at time index n
return history[n];
}
double energy(const int n) {
// return the energy of the system for timestep n
const auto& state = history[n];
// kinetic energy
double KE = 0.5 * (state.u * state.u + state.v * state.v);
double PE = -GM / std::sqrt(state.x * state.x + state.y * state.y);
return KE + PE;
}
OrbitState rhs(const OrbitState& state) {
// compute the ydot terms
OrbitState ydot;
ydot.x = state.u;
ydot.y = state.v;
double dx = state.x;
double dy = state.y;
double r = std::sqrt(dx * dx + dy * dy);
ydot.u = -GM * dx / std::pow(r, 3);
ydot.v = -GM * dy / std::pow(r, 3);
return ydot;
}
OrbitState single_step(const OrbitState& state_old, const double dt) {
/// take a single RK-4 timestep through dt
auto ydot1 = rhs(state_old);
OrbitState state_temp;
state_temp = state_old + 0.5 * dt * ydot1;
auto ydot2 = rhs(state_temp);
state_temp = state_old + 0.5 * dt * ydot2;
auto ydot3 = rhs(state_temp);
state_temp = state_old + dt * ydot3;
auto ydot4 = rhs(state_temp);
OrbitState s = state_old + (dt / 6.0) *
(ydot1 + 2.0 * ydot2 + 2.0 * ydot3 + ydot4);
return s;
}
void integrate(const double dt_in, const double err, const double tmax) {
// integrate the equations of motion using 4th order R-K
// method with an adaptive stepsize, to try to achieve the
// relative error err. dt here is the initial timestep
// if err < 0, then we don't do adaptive stepping, but rather
// we always walk at the input dt
// start with the old timestep
double dt_new{dt_in};
double dt{dt_in};
double t{0.0};
while (t < tmax) {
const auto &state_old = history.back();
// adaptive stepping iteration loop -- keep trying to take
// a step until we achieve our desired error
double rel_error = std::numeric_limits<double>::max();
int n_try{0};
OrbitState state_new;
while (rel_error > err) {
dt = std::min(dt_new, tmax - t);
// take 2 half steps
auto state_temp = single_step(state_old, 0.5*dt);
state_new = single_step(state_temp, 0.5*dt);
// now take just a single step to cover dt
auto state_single = single_step(state_old, dt);
// state_new should be more accurate than state_single
// since it used smaller steps
// estimate the relative error now
double pos_err =
std::max(std::abs((state_new.x - state_single.x) /
state_single.x),
std::abs((state_new.y - state_single.y) /
state_single.y));
double vel_err =
std::max(std::abs((state_new.u - state_single.u) /
state_single.u),
std::abs((state_new.v - state_single.v) /
state_single.v));
rel_error = std::max(pos_err, vel_err);
// adaptive timestep algorithm from Garcia (Eqs. 3.30
// and 3.31)
double dt_est = dt * std::pow(std::abs(err/rel_error), 0.2);
dt_new = std::min(std::max(0.9 * dt_est, 0.25 * dt), 4.0 * dt);
n_try++;
}
if (n_try > 1) {
// n_try = 1 if we took only a single try at the step
n_reset += (n_try - 1);
}
// successful step
t += dt;
// store the new solution -- this will automatically be
// used as the "old" state in the next step
time.push_back(t);
history.push_back(state_new);
}
}
};
int main() {
OrbitsRK4 o(1.0, 0.95);
o.integrate(0.05, 1.e-5, 1.0);
std::cout << "number of points = " << o.npts() << std::endl;
std::cout << "number of times a step was rejected = "
<< o.get_n_reset() << std::endl;
std::ofstream of("orbit_adaptive.dat");
for (int n = 0; n < o.npts(); ++n) {
const auto& state = o.get_state(n);
of << std::setw(14) << o.get_time(n);
of << state;
of.precision(10);
of << std::setw(18) << o.energy(n);
of << std::endl;
}
}