
Direct Solve for Implicit Diffusion#
We’ll solve the linear system resulting from our implicit discretization directly:
we’ll use the SciPy banded solver to do the linear algebra.
import numpy as np
import matplotlib.pyplot as plt
We’ll use the same grid class and initial conditions as used with the explicit method.
class Grid:
""" a simple class to hold cell-centered finite-difference /
finite-volume data """
def __init__(self, nx, ng, xmin=0.0, xmax=1.0):
self.xmin = xmin
self.xmax = xmax
self.ng = ng
self.nx = nx
# python is zero-based. Make easy integers to know where the
# real data lives
self.ilo = ng
self.ihi = ng+nx-1
# physical coords -- cell-centered
self.dx = (xmax - xmin)/(nx)
self.x = xmin + (np.arange(nx+2*ng)-ng+0.5)*self.dx
# storage for the solution
self.phi = np.zeros((nx+2*ng), dtype=np.float64)
def scratch_array(self):
""" return a scratch array dimensioned for our grid """
return np.zeros((self.nx+2*self.ng), dtype=np.float64)
def fill_BCs(self):
""" fill the ghostcells with zero gradient (Neumann)
boundary conditions """
self.phi[0:self.ilo] = self.phi[self.ilo]
self.phi[self.ihi+1:] = self.phi[self.ihi]
def norm(self, e):
""" return the norm of quantity e which lives on the grid """
if not len(e) == (2*self.ng + self.nx):
return None
return np.sqrt(self.dx*np.sum(e[self.ilo:self.ihi+1]**2))
def gaussian_ic(g, k, t=0.0, t0=1.e-4, phi1=1.0, phi2=2.0):
xc = 0.5*(g.xmin + g.xmax)
return (phi2 - phi1) * (np.sqrt(t0/(t + t0)) *
np.exp(-0.25 * (g.x - xc)**2 / (k * (t + t0)))) + phi1
Implementation#
Now, we have a few options for the linear algebra. We can:
Keep the matrix as sparse and only store the 3 diagonals that have nonzero elements. We can then use the SciPy
solve_bandedmethod to solve this.Construct the full dense matrix, including all the zeros. Here, the SciPy
sparse.diagsmethod can be helpful.
We’ll write a function to just do a single implicit solve of the system, with the intent that this will be called from the time-evolution loop.
from scipy import linalg
From the structure of our matrix, we have a main diagonal, \(d\), and an upper (\(u\)) and lower (\(l\)) diagonal. These have the form:
Where we keep \(l\) and \(u\) both to be length \(N\), but insert a \(0\) for the column where they are not defined.
For SciPy, we’ll make a matrix that has 3 rows:
This will be a \(3\times N\) matrix.
def implicit_step(gr, phi, k, dt):
""" diffuse phi implicitly through timestep dt """
phinew = gr.scratch_array()
alpha = k * dt / gr.dx**2
# create the RHS of the matrix
R = phi[gr.ilo:gr.ihi+1]
# create the diagonal, d+1 and d-1 parts of the matrix
d = (1.0 + 2.0*alpha)*np.ones(gr.nx)
u = -alpha*np.ones(gr.nx)
u[0] = 0.0
l = -alpha*np.ones(gr.nx)
l[-1] = 0.0
# set the boundary conditions by changing the matrix elements
# homogeneous neumann
d[0] = 1.0 + alpha
d[-1] = 1.0 + alpha
# solve
A = np.matrix([u, d, l])
phinew[gr.ilo:gr.ihi+1] = linalg.solve_banded((1, 1), A, R)
return phinew
Here’s the main evolution loop. It works in the same fashion as our explicit implementation.
def diffuse_implicit(nx, k, C, tmax, init_cond):
"""
the main evolution loop. Evolve
phi_t = k phi_{xx}
from t = 0 to tmax
"""
# create the grid
ng = 0
g = Grid(nx, ng)
# time info
dt = C * 0.5 *g.dx**2 / k
t = 0.0
# initialize the data
g.phi[:] = init_cond(g, k)
while t < tmax:
# make sure we end right at tmax
if t + dt > tmax:
dt = tmax - t
# diffuse for dt
phinew = implicit_step(g, g.phi, k, dt)
g.phi[:] = phinew[:]
t += dt
return g
Trends with timestep size#
Now we can test it out. Implicit methods are stable for all timesteps, but keep in mind that stability is not the same as accuracy. Let’s vary the timestep size to see what happens.
nx = 128
k = 1
t_diffuse = (1.0/nx)**2 / k
fig, ax = plt.subplots()
tmax = 10 * t_diffuse
for C in [0.8, 2, 10]:
g = diffuse_implicit(nx, k, C, tmax, gaussian_ic)
ax.plot(g.x[g.ilo:g.ihi+1], g.phi[g.ilo:g.ihi+1], label=f"C = {C}")
ax.set_xlim(0.35, 0.65)
ax.set_xlabel("$x$")
ax.set_ylabel(r"$\phi$")
ax.set_title(f"t = {tmax:7.3g}")
ax.legend()
<matplotlib.legend.Legend at 0x7f8a786241a0>
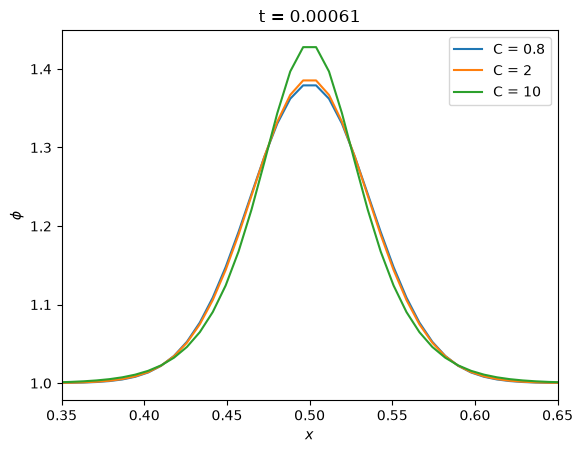
We see that even at a large value of \(C\), the solution remains stable.
Convergence#
Let’s look at the convergence of this discretization
nx_reference = 64
t_diffuse = (1.0/nx_reference)**2 / k
fig, ax = plt.subplots()
Ns = [16, 32, 64, 128, 256, 512]
dxs = []
errors = []
tmax = 10 * t_diffuse
C = 0.8
for nx in Ns:
g = diffuse_implicit(nx, k, C, tmax, gaussian_ic)
phi_analytic = gaussian_ic(g, k, t=tmax)
dxs.append(g.dx)
errors.append(g.norm(g.phi - phi_analytic))
ax.scatter(dxs, errors, marker="x")
ideal = errors[-1] * np.array(dxs)**2 / dxs[-1]**2
ax.plot(dxs, ideal, color="0.5", ls=":", label=r"$\mathcal{O}(\Delta x^2)$")
ax.legend()
ax.set_xscale("log")
ax.set_yscale("log")
ax.set_xlabel(r"$\Delta x$")
ax.set_ylabel("absolute error")
Text(0, 0.5, 'absolute error')
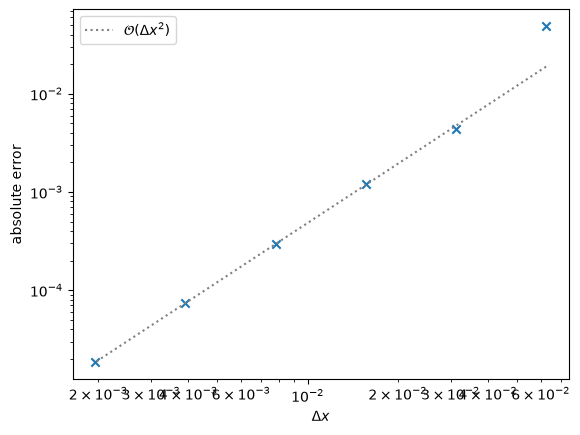
We see second-order convergence, as with the explicit method.
Note
The errors are slightly worse than the explicit discretion in general, but we do much better at coarse resolutions.