
Show code cell content
import numpy as np
import matplotlib.pyplot as plt
import matplotlib as mpl
mpl.rcParams['figure.dpi'] = 100
mpl.rcParams['figure.figsize'] = (10, 8)
Implicit Methods and Nonlinear Systems#
Nonlinear system#
Consider the following nonlinear system:
The Jacobian is:
(this example comes from the VODE documentation)
We’ll use the initial conditions
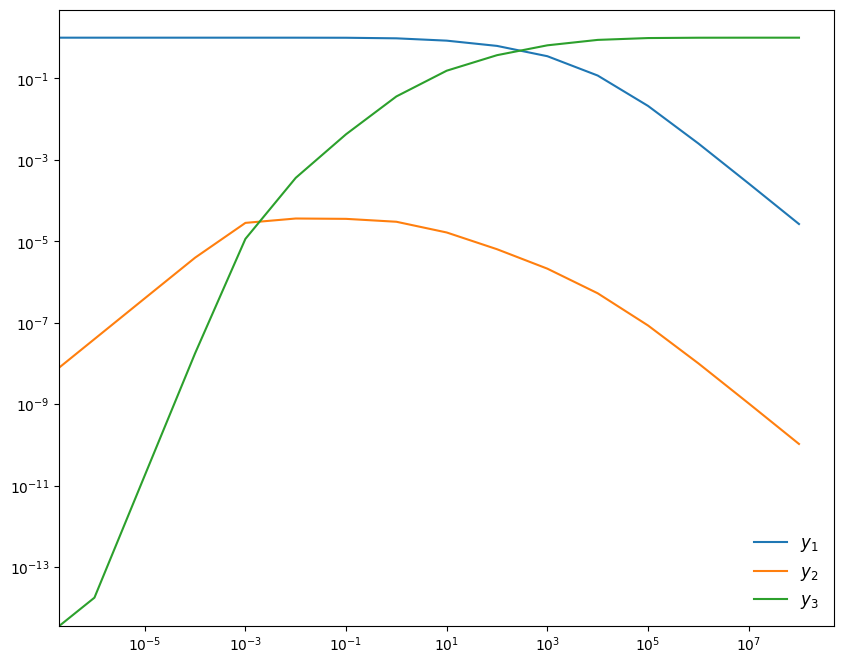
This system has the longterm behavior that:
Although \(y_2\) is initially 0, it will build up quickly and feed the creation of \(y_3\).
Linearization#
Let’s write our system as:
We will discretize this as:
We will linearize the righthand side. We’ll start with an initial guess for the new-time solution, \({\bf y}_0^{n+1}\), and seek a correction, \(\Delta {\bf y}_0\) such that:
Now we insert this in \({\bf f}\) and Taylor expand:
Our linearized system becomes:
or in terms of the correction:
This is a linear system that we can solve. The basic idea will be:
Apply the correction
Check for convergence: \(\| \Delta {\bf y} \| < \epsilon \| {\bf y}^n \|\)
Iterate, finding the next correction until we converge
Backward Euler Implementation#
First we need functions for the righthand side and Jacobian
def rhs(t, Y):
""" RHS of the system -- using 0-based indexing """
y1 = Y[0]
y2 = Y[1]
y3 = Y[2]
dy1dt = -0.04*y1 + 1.e4*y2*y3
dy2dt = 0.04*y1 - 1.e4*y2*y3 - 3.e7*y2**2
dy3dt = 3.e7*y2**2
return np.array([dy1dt, dy2dt, dy3dt])
def jac(t, Y):
""" J_{i,j} = df_i/dy_j """
y1 = Y[0]
y2 = Y[1]
y3 = Y[2]
df1dy1 = -0.04
df1dy2 = 1.e4*y3
df1dy3 = 1.e4*y2
df2dy1 = 0.04
df2dy2 = -1.e4*y3 - 6.e7*y2
df2dy3 = -1.e4*y2
df3dy1 = 0.0
df3dy2 = 6.e7*y2
df3dy3 = 0.0
return np.array([ [ df1dy1, df1dy2, df1dy3 ],
[ df2dy1, df2dy2, df2dy3 ],
[ df3dy1, df3dy2, df3dy3 ] ])
Next we’ll write the main driver. This integrates from [t, tmax] using a timestep dt_init. We specify a tolerance for the convergence of the nonlinear system solve for each step.
SMALL = 1.e-100
def backwards_euler(t, tmax, dt_init, y_init, rhs, jac,
tol=1.e-6, max_iter=100):
"""solve the system dy/dt = f(y), where f(y) is provided by the
routine rhs(), and the Jacobian is provided by the routine jac().
t : the current time
tmax : the ending time of integration
dt_init : initial timestep
y_init : the initial conditions
"""
time = t
dt = dt_init
# starting point of integration of each step
y_n = np.zeros_like(y_init)
y_n[:] = y_init[:]
y_new = np.zeros_like(y_init)
while time < tmax:
converged = False
# we want to solve for the updated y. Set an initial guess to
# the current solution.
y_new[:] = y_n[:]
err = 1.e30
niter = 0
neq = len(y_init)
while err > tol and niter < max_iter:
# construct the matrix A = I - dt J
A = np.eye(neq) - dt * jac(time, y_n)
# construct the RHS
b = y_n - y_new + dt * rhs(time, y_new)
# solve the linear system A dy = b
dy = np.linalg.solve(A, b)
# correct our guess
y_new += dy
# check for convergence
err = np.linalg.norm(dy) / np.linalg.norm(y_new) #max(abs(y_new) + SMALL)
niter += 1
if time + dt > tmax:
dt = tmax - time
y_n[:] = y_new[:]
time += dt
return y_n
We’ll follow the example from the VODE documentation and integrate in several chunks. We’ll evolve from \(t = 0\) stopping at \(t = 10^{-6}, 10^{-5}, \ldots 10^8\). Each call to the integrator will begin with the time from the previous integration, and we’ll always set \(\tau\) to have ~10 steps per interval.
y_init = np.array([1.0, 0.0, 0.0])
# like the vode driver, we will do the integration in a bunch of
# pieces, increasing the stopping time by 10x each run
tends = np.logspace(-6, 8, 15)
time = 0.0
y_old = y_init.copy()
ys = []
for y in y_init:
ys.append([y])
ts = [time]
total_be_solves = 0
for tmax in tends:
y_new = backwards_euler(time, tmax, tmax/10, y_old, rhs, jac)
time = tmax
ts.append(time)
for n, y in enumerate(y_new):
ys[n].append(y)
y_old[:] = y_new[:]
Now we can plot the 3 species
fig = plt.figure()
ax = fig.add_subplot(111)
for n, y in enumerate(ys):
ax.plot(ts, y, label=rf"$y_{n+1}$")
ax.legend(frameon=False, fontsize="large")
ax.set_xscale("log")
ax.set_yscale("log")
Comparison of Methods#
from scipy.integrate import solve_ivp
Now we can try integrating this system using any of the methods built into SciPy https://docs.scipy.org/doc/scipy/reference/generated/scipy.integrate.solve_ivp.html
We are successful if we try BDF, but we fail if we try the RK45 method. This is an empirical demonstration that this problem is stiff.
sol = solve_ivp(rhs, [0, 1.e8], [1, 0, 0], method="BDF", dense_output=True)
print(sol)
message: The solver successfully reached the end of the integration interval.
success: True
status: 0
t: [ 0.000e+00 3.196e-05 ... 9.399e+07 1.000e+08]
y: [[ 1.000e+00 1.000e+00 ... 2.209e-05 2.075e-05]
[ 0.000e+00 1.277e-06 ... 8.836e-11 8.300e-11]
[ 0.000e+00 1.320e-09 ... 1.000e+00 1.000e+00]]
sol: <scipy.integrate._ivp.common.OdeSolution object at 0x7f8d1ba31cc0>
t_events: None
y_events: None
nfev: 443
njev: 12
nlu: 57