In-Class Example#
Let’s practice writing a solver for an ODE system.
We’ll consider the Lorenz system. This is a toy-model of atmospheric convection. In a seminal paper, Deterministic Nonperiodic Flow, Lorenz explored this system and showed that it exhibited chaotic behavior.
The system can be expressed as:
where \(x\) is related to the intensity of the convective motion, \(y\) is related to the temperature difference between up and down currents, and \(z\) is related to the departure of the temperature profile from linear (with height). The constants have the following meanings: \(\sigma\) is the Prandtl number, \(r\) is the Rayleigh number (scaled to the critical value), and \(b\) is needed to define the critical Rayleigh number.
Lorenz chose \(\sigma = 10\), \(b = 8/3\), and \(r = 28\)
Exercise
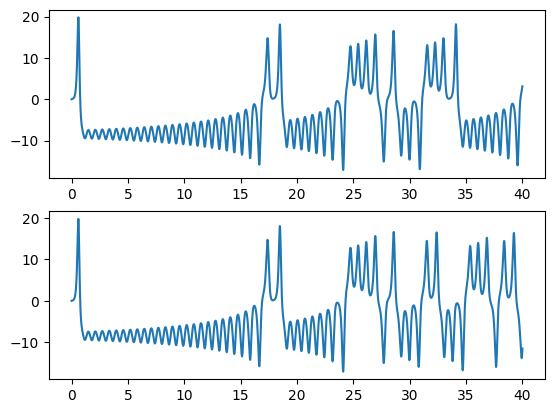
Evolve this system using 4th-order Runge-Kutta and explore how the solution changes with small perturbations to the initial conditions.
sigma = 10.0
b = 8./3.
r = 28.0
import numpy as np
import matplotlib.pyplot as plt
def rhs(xvec):
x, y, z = xvec
dxdt = sigma * (y - x)
dydt = x * (r - z) - y
dzdt = x * y - b * z
return np.array([dxdt, dydt, dzdt])
def integrate(xvec0, dt_in, tmax):
t = 0.0
dt = dt_in
times = [t]
history = [np.array(xvec0)]
while t < tmax:
if t + dt > tmax:
dt = tmax - t
state_old = history[-1]
k1 = rhs(state_old)
k2 = rhs(state_old + 0.5 * dt * k1)
k3 = rhs(state_old + 0.5 * dt * k2)
k4 = rhs(state_old + dt * k3)
state_new = state_old + (dt / 6.0) * (k1 + 2 * k2 + 2 * k3 + k4)
t += dt
times.append(t)
history.append(state_new)
return times, history
xvec0 = np.array([0.0, 0.1, 0.0])
tmax = 40.0
dt = 0.01
times, history = integrate(xvec0, dt, tmax)
xvec0 = np.array([0.0, 0.1001, 0.0])
tmax = 40.0
dt = 0.01
times2, history2 = integrate(xvec0, dt, tmax)
xs = [v[0] for v in history]
ys = [v[1] for v in history]
zs = [v[2] for v in history]
fig, ax = plt.subplots()
ax.plot(times, xs, label="x")
ax.plot(times, ys, label="y")
ax.plot(times, zs, label="z")
ax.legend()
<matplotlib.legend.Legend at 0x7fedec9840d0>
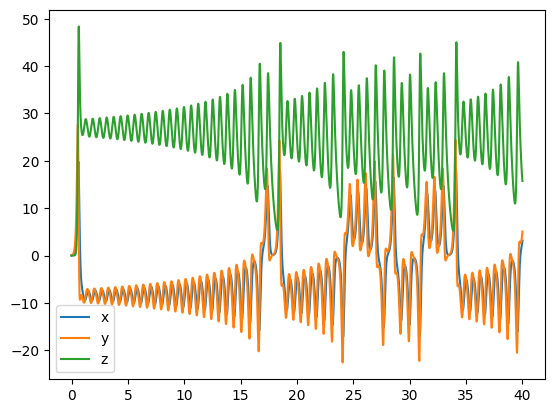
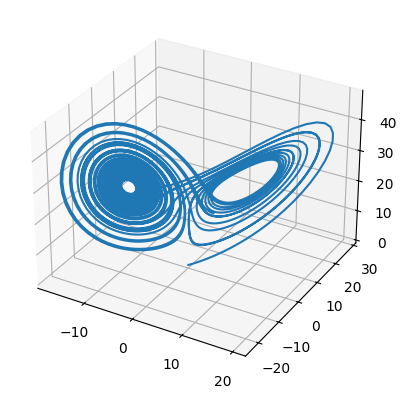
fig = plt.figure()
ax = fig.add_subplot(projection='3d')
ax.plot(xs, ys, zs)
[<mpl_toolkits.mplot3d.art3d.Line3D at 0x7fedd7f35cd0>]
xs2 = [v[0] for v in history2]
ys2 = [v[1] for v in history2]
zs2 = [v[2] for v in history2]
ax.plot(xs2, ys2, zs2)
fig.set_size_inches(10, 10)
fig
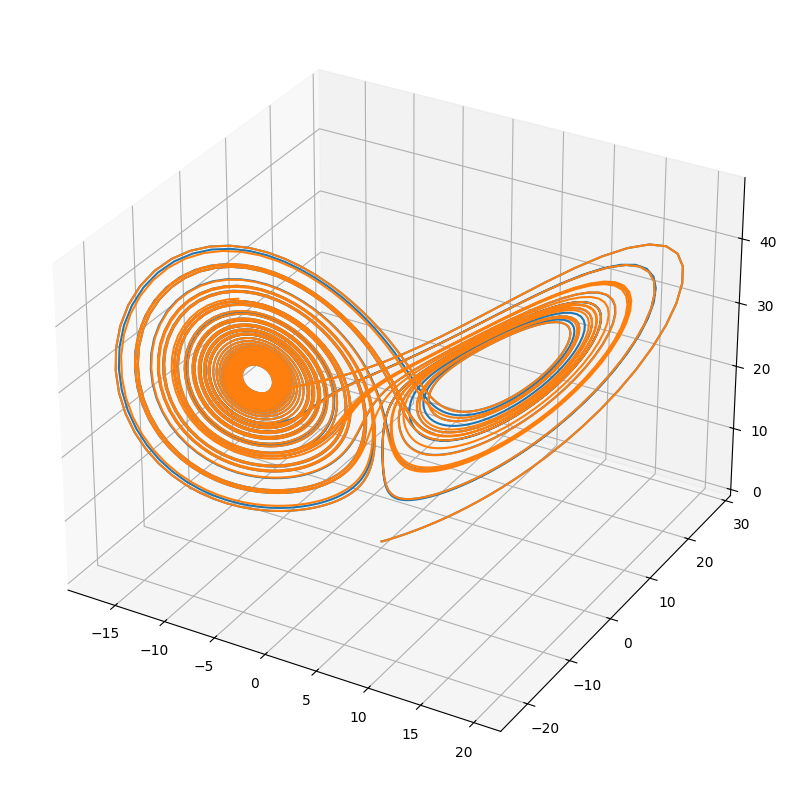
fig = plt.figure()
ax = fig.add_subplot(211)
ax.plot(times, xs)
ax = fig.add_subplot(212)
ax.plot(times2, xs2)
[<matplotlib.lines.Line2D at 0x7fedf5052dd0>]