Neutron star structure#
We’ll investigate neutron star structure by consider both the standard hydrostatic equilibrium:
and the general relativistic Tolman-Oppenheimer-Volkoff equation:
In both cases, \(M(r)\) satisties:
import numpy as np
import matplotlib.pyplot as plt
Here’s a general integration class that implemented 4th order Runge-Kutta. It takes
a rhs function of the form:
rhs(r, Y, rho_func)
that returns the derivatives \(d{\bf Y}/dr\) for each of the variables in the array \({\bf Y}\).
Here, rho_func is a function rho_func(pres) that takes the pressure and returns the
density according to our EOS.
It can also take a list of stopping criteria for each variable, so we end the integration when we reach the edge of the star. The integration step is fixed, until we hit the stopping criteria. Then it cuts dx by factors of 2 until we meet our tolerance at the stopping point.
class Integrator:
""" this is a simple RK4 integrator with a uniform step size
that can accept a list of stopping criteria to halt the integration.
There is one list element for each variable. An entry of "None"
means that we have no stopping criteria for that variable. A tuple
of the form ("LT", val) or ("GT", val), means that we stop if
y[n] < val (or y[n] > val)
"""
def __init__(self, rhs, *, stop_cond=None, rhs_args=None):
self.rhs = rhs
self.stop_cond = stop_cond
if rhs_args is None:
rhs_args = []
self.args = rhs_args
def rk4_step(self, x, y, dx):
dydx1 = self.rhs(x, y, *self.args)
y1 = y + 0.5*dx*dydx1
if self.check_stop_cond(y1) < 0: return None
dydx2 = self.rhs(x + 0.5*dx, y1, *self.args)
y2 = y + 0.5*dx*dydx2
if self.check_stop_cond(y2) < 0: return None
dydx3 = self.rhs(x + 0.5*dx, y2, *self.args)
y3 = y + dx*dydx3
if self.check_stop_cond(y3) < 0: return None
dydx4 = self.rhs(x + dx, y3, *self.args)
y_final = y + (dx/6.0)*(dydx1 + 2.0*dydx2 + 2.0*dydx3 + dydx4)
if self.check_stop_cond(y_final) < 0: return None
return y_final
def check_stop_cond(self, y):
# check our stopping conditions
if not self.stop_cond is None:
for n, cond in enumerate(self.stop_cond):
if cond is None: continue
c, v = cond
if c == "LT":
if y[n] < v: return -1
elif c == "GT":
if ynew[n] > v: return -1
else:
sys.exit("invalid condition")
return 0
def integrate(self, initial_conditions, dx, xmax, tol=1.e-8):
ic = np.array(initial_conditions)
N = len(ic)
sol = {}
for n in range(N):
sol[f"y{n}"] = [ic[n]]
x = 0.0
sol["x"] = [x]
y = initial_conditions
while (x < xmax and dx > tol * xmax):
# advance for a step
ynew = self.rk4_step(x, y, dx)
if ynew is None:
# we hit our stopping condition
# cut the stepsize so we can try to get closer
dx /= 2
continue
# store the solution
x += dx
sol["x"].append(x)
for n in range(N):
sol[f"y{n}"].append(ynew[n])
y = ynew
return sol
For the both HSE and TOV, we integrate
All of our units will be in CGS.
Some physical constants (CGS)
G = 6.67e-8
c = 3.e10
h = 6.63e-27
m_u = 1.66e-24
Here’s the righthand side function for the TOV equation
def rhs_tov(r, y, rho_func):
m = y[0]
P = y[1]
rho = rho_func(P)
dmdr = 4.0 * np.pi * r**2 * rho
if r == 0.0:
dPdr = 0.0
else:
rho_term = rho + P / c**2
m_term = m + 4.0 * np.pi * r**3 * P / c**2
metric_term = (1.0 - 2.0 * G * m / (r * c**2))
dPdr = -(G / r**2) * rho_term * m_term / metric_term
return np.array([dmdr, dPdr])
Here’s the righthand side function for Newtonian HSE
def rhs_newton(r, y, rho_func):
m = y[0]
P = y[1]
rho = rho_func(P)
dmdr = 4.0 * np.pi * r**2 * rho
if r == 0.0:
dPdr = 0.0
else:
dPdr = -G * m / r**2 * rho
return np.array([dmdr, dPdr])
Degenerate neutrons#
For zero-T neutron degeneracy, the number density of neutrons is just the integral of the distribution function, \(n(p)\), over all momenta:
but at zero temperature the distribution function is just a step function:
This gives:
where \(x_F = p_F / (m_u c)\).
We can then compute the pressure as:
where we now need to use the general expression for velocity,
This gives:
with
from scipy.optimize import brentq
def pres_deg(rho):
# compute the Fermi momentum x = p / mc
B = 8 * np.pi * m_u / 3.0 * (m_u * c / h)**3
x = np.cbrt(rho / B)
f = x * (2 * x**2 - 3) * np.sqrt(1 + x**2) + 3 * np.arcsinh(x)
A = (np.pi / 3) * (m_u * c / h)**3 * m_u * c**2
return A * f
def rho_deg(pres):
A = (np.pi / 3) * (m_u * c / h)**3 * m_u * c**2
f = pres / A
# find the x that gives us this f
x = brentq(lambda x: f - (x * (2 * x**2 - 3) * np.sqrt(1 + x**2) + 3 * np.arcsinh(x)), 0, 10)
B = 8 * np.pi * m_u / 3.0 * (m_u * c / h)**3
return B * x**3
A polytropic nuclear EOS#
A simple polytopic approximation to a nuclear equation of state (the SLy4 EOS) is:
If we choose \(K = 3.5 \mathrm{MeV~fm^{-3}}\) and \(\rho_0 = 150 \mathrm{MeV~fm^{-3}}\), we approximate the behavior of the SLy4 nuclear EOS (thanks to Tianqi Zhao for these approximations) with \(\gamma = 2.5\).
In CGS units, using \(\gamma = 2.5\), we can take \(K = 4.80\times 10^{-3}~\mathrm{erg~cm^{-3}}\) and write this as:
def pres_nuc(rho):
gamma = 2.5
K = 4.8e-3
return K * rho**gamma
def rho_nuc(pres):
gamma = 2.5
K = 4.8e-3
return (pres / K)**(1.0 / gamma)
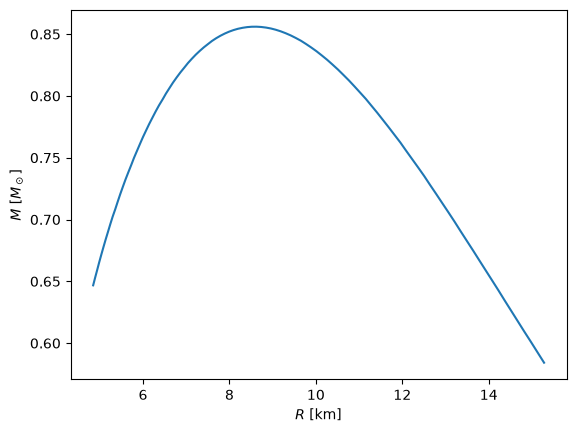
Case I: Newtonian gravity, neutron degeneracy#
We’ll loop over the central density and integrate the neutron star structure and store the mass and radius corresponding to each central density.
ns1 = Integrator(rhs_newton, rhs_args=[rho_deg],
stop_cond=[("LT", 0.0), ("LT", 0.0)])
R_max = 5.e6
N = 1000
mass = []
radius = []
for rhoc in np.logspace(np.log10(5.e14), np.log10(5.e16), 100):
Pc = pres_deg(rhoc)
sol = ns1.integrate([0.0, Pc], R_max/N, R_max)
mass.append(sol["y0"][-1]/2.e33)
radius.append(sol["x"][-1]/1.e5)
fig, ax = plt.subplots()
ax.plot(radius, mass)
ax.set_xlabel("$R$ [km]")
ax.set_ylabel(r"$M$ [$M_\odot$]")
Text(0, 0.5, '$M$ [$M_\\odot$]')
Here we see a curve reminiscient of the white dwarf mass-radius relation. This is not physical since we’ve neglected GR and the nuclear interactions.
What happens if we take \(\rho \rightarrow \infty\)? We should get the neutron star version of the Chandrasekhar mass:
For electrons, the \(\mu\) was \(\mu_e\), but now it is just \(\mu = 1\) for neutrons, giving a mass of \(M_\mathrm{Ch} \sim 5.76~ M_\odot\)
ns1 = Integrator(rhs_newton, rhs_args=[rho_deg],
stop_cond=[("LT", 0.0), ("LT", 0.0)])
R_max = 5.e6
N = 1000
mass = []
radius = []
for rhoc in np.logspace(np.log10(5.e14), np.log10(5.e18), 100):
Pc = pres_deg(rhoc)
sol = ns1.integrate([0.0, Pc], R_max/N, R_max)
mass.append(sol["y0"][-1]/2.e33)
radius.append(sol["x"][-1]/1.e5)
fig, ax = plt.subplots()
ax.plot(radius, mass)
ax.set_xlabel("$R$ [km]")
ax.set_ylabel(r"$M$ [$M_\odot$]")
Text(0, 0.5, '$M$ [$M_\\odot$]')
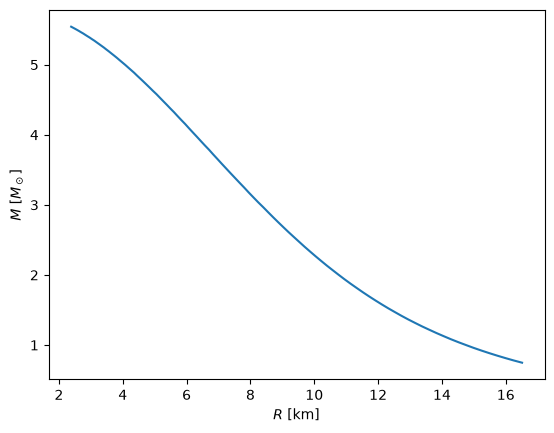
We see that we are approaching that maximum mas as \(R \rightarrow 0\), as expected.
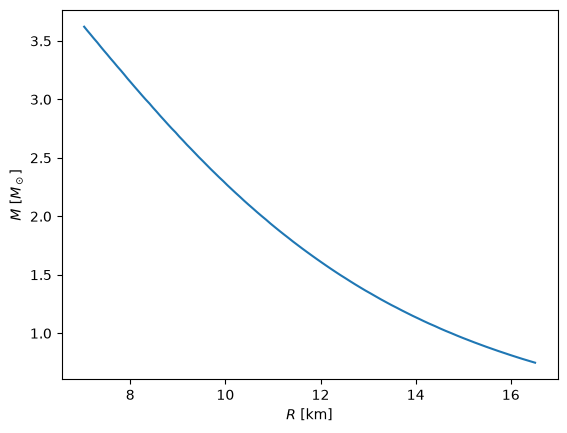
Case II: GR gravity + degenerate EOS#
ns2 = Integrator(rhs_tov, rhs_args=[rho_deg],
stop_cond=[("LT", 0.0), ("LT", 0.0)])
R_max = 5.e6
N = 1000
# my vector is [m, p]
mass = []
radius = []
for rhoc in np.logspace(np.log10(5.e14), np.log10(5.e16), 100):
Pc = pres_deg(rhoc)
sol = ns2.integrate([0.0, Pc], R_max/N, R_max)
mass.append(sol["y0"][-1]/2.e33)
radius.append(sol["x"][-1]/1.e5)
fig, ax = plt.subplots()
ax.plot(radius, mass)
ax.set_xlabel("$R$ [km]")
ax.set_ylabel(r"$M$ [$M_\odot$]")
Text(0, 0.5, '$M$ [$M_\\odot$]')
Now, adding GR, we see that there is a maximum mass for the neutron star, but it is quite low.
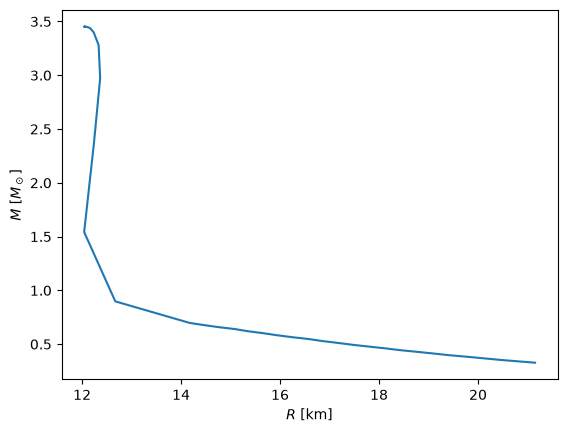
Case III: GR gravity + nuclear EOS#
ns3 = Integrator(rhs_tov, rhs_args=[rho_nuc],
stop_cond=[("LT", 0.0), ("LT", 0.0)])
R_max = 5.e6
N = 1000
# my vector is [m, p]
mass = []
radius = []
for rhoc in np.logspace(np.log10(5.e14), np.log10(5.e16), 100):
Pc = pres_nuc(rhoc)
sol = ns3.integrate([0.0, Pc], R_max/N, R_max)
mass.append(sol["y0"][-1]/2.e33)
radius.append(sol["x"][-1]/1.e5)
fig, ax = plt.subplots()
ax.plot(radius, mass)
ax.set_xlabel("$R$ [km]")
ax.set_ylabel(r"$M$ [$M_\odot$]")
Text(0, 0.5, '$M$ [$M_\\odot$]')
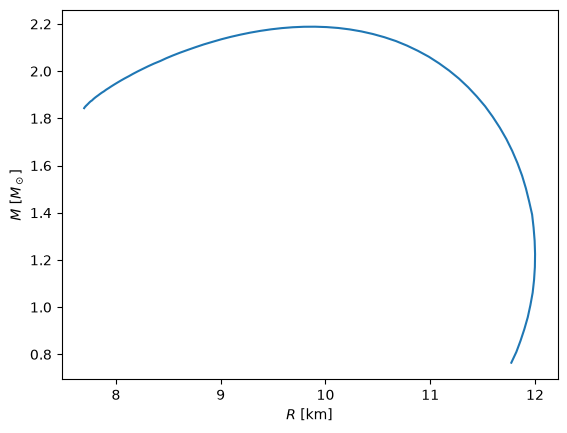
In this final case, we get a much more reasonable maximum neutron star mass. We also see that for some values of radius there are multiple masses (the M-R relation is double-valued) – this is okay. However, at the very highest central densities, we get a smaller mass than the maximum at a smaller radius – that is not physical, and is dynamically unstable.
Case IV: Blended EOS#
Let’s now try an EOS that is stiff at the center but transitions to the non-relativisitic neutron degeneracy EOS at lower densities.
We’ll write this as:
We’ll take \(K_0\), \(\gamma_0\) to be the non-relativitic neutron degeneracy parameters, \(\gamma_0 = 5/3\) and
For the transition density, we will take \(x_F = 1/2\), which gives
We’ll take \(\gamma_1 = 2.5\) as above
Let’s evaluate these
gamma_0 = 5./3.
gamma_1 = 10
rho_tr = m_u * (8 * np.pi / 3) * (m_u * c / h)**3 * (1/2)**3
rho_tr
736688938797371.4
K0 = h**2/20 * (3/np.pi)**(2/3) / m_u**(8/3)
K0
5516831857.874235
K1 = K0 * rho_tr**(gamma_0 - gamma_1)
K1
7.041337677911962e-115
That gives a transition density of \(\sim 7\times 10^{14}~\mathrm{g~cm^{-3}}\)
def pres_blend(rho):
if rho < rho_tr:
return K0 * rho**gamma_0
return K1 * rho**gamma_1
def rho_blend(pres):
P_tr = K0 * rho_tr**gamma_0
if pres < P_tr:
return (pres / K0)**(1/gamma_0)
return (pres / K1)**(1/gamma_1)
ns4 = Integrator(rhs_tov, rhs_args=[rho_blend],
stop_cond=[("LT", 0.0), ("LT", 0.0)])
R_max = 5.e6
N = 100
# my vector is [m, p]
mass = []
radius = []
for rhoc in np.logspace(np.log10(1.e14), np.log10(2.e16), 60):
Pc = pres_blend(rhoc)
sol = ns4.integrate([0.0, Pc], R_max/N, R_max)
mass.append(sol["y0"][-1]/2.e33)
radius.append(sol["x"][-1]/1.e5)
fig, ax = plt.subplots()
ax.plot(radius, mass)
ax.set_xlabel("$R$ [km]")
ax.set_ylabel(r"$M$ [$M_\odot$]")
Text(0, 0.5, '$M$ [$M_\\odot$]')